Motorized Stages
Guide
Measurement of Rotation Stage Accuracy
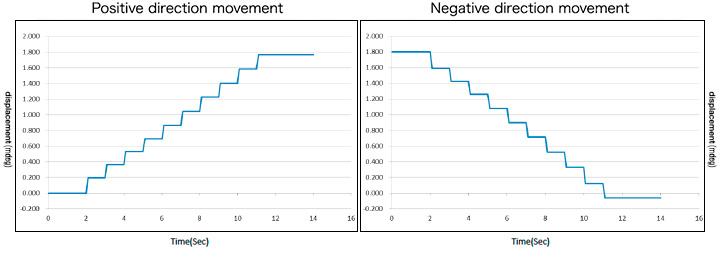
Positional Accuracy
Positioning is performed successively from the reference position in one direction at a fixed interval across almost the entire range of travel.
The difference between the target values and measured values at each of the positioning points is calculated, and the difference between the minimum and maximum values is taken to be the positioning accuracy.
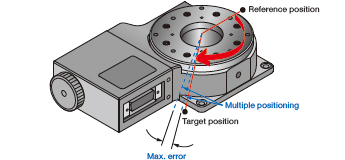
Positioning is performed multiple times in the (+) forward and (-) backward directions on any position (e.g. both ends or center point) of the stage, and the mean value of the deviation amount with respect to the stop position is calculated.
The maximum of the numerical values is taken to be lost motion.
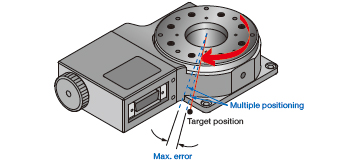
Positional Repeatability 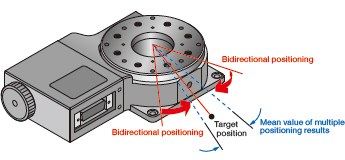
Positioning is performed multiple times from the same direction on any position of the stage, and the maximum value of the deviation amount with respect to the stop position is calculated.The maximum of those numerical values is taken to be positional repeatability.
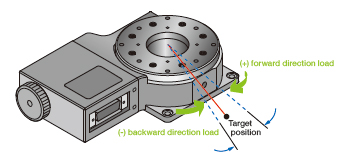
A fixed load is applied to the (+) forward or (-) backward direction on any position of the stage. The total deviation in the respective direction at that time is taken to be backlash.
Working Accuracy
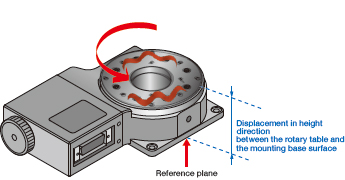
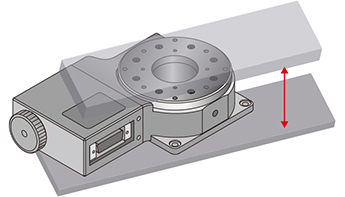
Wobble is the maximum displacement in the height direction between the rotary table and the mounting base surface when the rotation stage is rotated once.
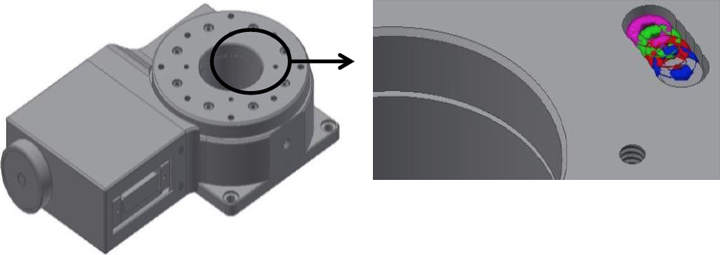
Concentricity is the difference between the ideal rotation center and the actual rotation center when the rotation stage is rotated once.
| Maximum Lost Motion | 0.0163° |
| Positional Repeatability Unidirectional Positioning ↑ Bidirectional Positioning |
0.0022° 0.0009° 0.0168° |
| Positioning Accuracy | 0.0330° |
| Error per Rotation (maximum) | 2.60° |
| Wobble Accuracy Parallelism Concentricity |
12µm 27µm 8µm |
Angular Accuracy
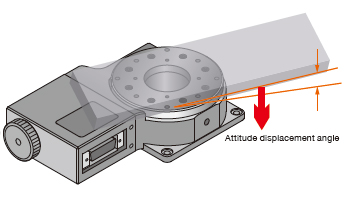
The angular displacement of the stage when unit moment load is applied.
The parallelism of the table fixed on the stage against the base plane.
Minimum Incremental Motion(MIM)
The incremental when the stage is finely positioned at any three positions (center and both ends) is defined as minimum incremental motion(MIM).
To verify the MIM, the stage is finely positioned at three positins in positive direction and negative direction of 10 points for linear stage. Or positioned in CCW direction and CW direction for rotation stage. Then the responsivity is observed.
A capacitance sensor for linear stage and auto collimater for rotation stage is used to observe the incrementally.
(Reference) Minimum Incremental Motion (MIM) of HST-120YAW